Fuchen Chen
iicfcii@gmail.com
Resume
Google Scholar
About
Research
Laminate Quadruped
Linkage Synthesis
Foldable Robots
Pneumetic Soft Actuators
Startup
Tinkerings
About
I’m currently a robotics PhD candidate in the Integrating Design, Engineering, and Analysis (IDEA) Lab led by Professor Dan Aukes at Arizona State University (ASU) (01/2021 - Present). I plan to graduate in December 2025, and I am looking for a job in academia or industry.
I received my Master’s and Bachelor’s degrees in Robotics Engineering from Worcester Polytechic Institue (WPI) (08/2012 - 12/2017). During that time, I was also a research assistant in the WPI Soft Robotics Lab run by Professor Cagdas Onal. Before my PhD, I cofounded a startup company called Orimagi, where I was in charge of the development and production of an educational origami robot kit.
My research used to focus on design, fabrication, and control methods for accessible robots. These robots excel at tasks where cost, compliance, and safety are priorities instead of precision and power. Studies of them also help us better balance rigidity and softness, active and passive intelligence within robots for different applications. I am currently exploring methods to optimize the robot design and control jointly toward desired tasks. I believe they will lead us to task-specific robots with the optimal balance. A list of my publications is available at Google Scholar.
Research
Laminate Quadruped
At IDEA Lab, I am developing simulation models, fabrication pipelines, and reinforcement learning frameworks to enable tuning and optimization of dynamic laminate robots made from low-cost and compliant materials. The core of the robots are multi-layer, multi-material laminates that are cut, folded, and locked into three-dimensional mechanisms, providing desired motion and stiffness profiles. This enables me to parameterize the leg design space and semi-automate the design and fabrication process. Reinforcement learning is leveraged to construct performance maps of different designs. Interpretable and insightful performance trends and design principles then naturally emerge from the process. Even though I am focusing on a quadruped right now, I hope to extend and generalize this process to other platforms. Here is the project website for the two most recent papers.
-
F. Chen and D. M. Aukes, “Informed Repurposing of Quadruped Legs for New Tasks,” in 2025 IEEE International Conference on Robotics and Automation (ICRA), May 2025, pp. 2584–2590. doi:10.1109/ICRA55743.2025.11128237.
-
F. Chen and D. M. Aukes, “Curating Tunable, Compliant Legs for Specialized Tasks,” The International Journal of Robotics Research, May 2025. doi:10.1177/02783649251337110.
-
F. Chen, W. Tao, and D. M. Aukes, “Development of A Dynamic Quadruped with Tunable, Compliant Legs,” in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA: IEEE, Oct. 2023, pp. 495–502. doi: 10.1109/IROS55552.2023.10342283.
-
F. Chen and D. M. Aukes, “Direct Encoding of Tunable Stiffness Into an Origami-Inspired Jumping Robot Leg,” Journal of Mechanisms and Robotics, vol. 16, no. 3, Mar. 2023, doi: 10.1115/1.4056958.
Linkage Synthesis
In an effort to increase the design space of the quadruped legs, I am developing a GPU-accelerated multi-degree-of-freedom multi-bar planar/spherical linkage synthesis tool. I haven’t made any publication about it but here are two preliminary design examples: an 8-bar 1-DoF leg with a V-shaped mechanical advantage curve, and an 8-bar 3-DoF parallel leg with a human-like workspace. I believe this tool has potential beyond leg designs. Please contact me if you are interested.
Here is a visulization of the gradient-based optimization process for a six-bar leg design. Many initial designs are sampled and optimized in parallel on GPU to get closer to the global optimum.
Foldable Robots
At WPI Soft Robotics Lab, I developed a hierarchical process of designing a series of affordable legged and aerial robots folded from plastic sheets.

-
S. G. Faal et al., “Design, Fabrication, Experimental Analysis, and Test Flight of an Origami-Based Fixed-Wing Aerial Vehicle: µPlane,” presented at the ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers Digital Collection, Dec. 2016. doi: 10.1115/DETC2016-60477.
-
S. G. Faal, F. Chen, W. Tao, M. Agheli, S. Tasdighikalat, and C. D. Onal, “Hierarchical Kinematic Design of Foldable Hexapedal Locomotion Platforms,” Journal of Mechanisms and Robotics, vol. 8, no. 1, Aug. 2015, doi: 10.1115/1.4030468.
-
M. Agheli, S. G. Faal, F. Chen, H. Gong, and C. D. Onal, “Design and fabrication of a foldable hexapod robot towards experimental swarm applications,” in 2014 IEEE International Conference on Robotics and Automation (ICRA), May 2014, pp. 2971–2976. doi: 10.1109/ICRA.2014.6907287.
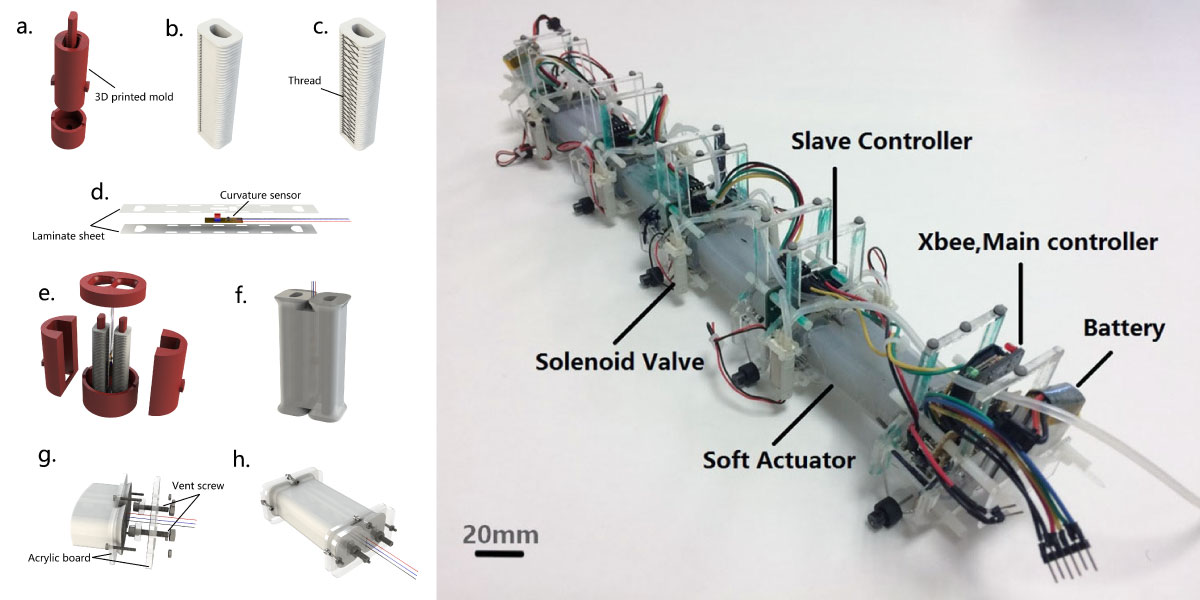
Pneumetic Soft Actuators
I also designed a series of bending and linear pneumatic soft actuators and their fabrication processes. The bending one also has integrated curvature sensing. They are the building blocks of a soft snake robot and are also used to study soft robot control algorithms.
-
M. Luo et al., “Motion Planning and Iterative Learning Control of a Modular Soft Robotic Snake,” Frontiers in Robotics and AI, vol. 7, 2020, doi: 10.3389/frobt.2020.599242.
-
M. Luo et al., “Toward Modular Soft Robotics: Proprioceptive Curvature Sensing and Sliding-Mode Control of Soft Bidirectional Bending Modules,” Soft Robotics, vol. 4, no. 2, pp. 117–125, Jun. 2017, doi: 10.1089/soro.2016.0041.